 22/06/15
22/06/15Att fånga ljus i ofokuserat läge är en utmaning för att uppnå tydliga bilder med hög kontrast i många bildtillämpningar. Digital Scanned Light Sheet Microscopy (DSLM) erbjuder ett kraftfullt sätt att minska ljusinfångning i ofokuserat läge genom att synkronisera belysning med den "rullande slutaren" i moderna CMOS-kameror. Denna exakta synkronisering kräver dock fullständig kontroll över kamerans rullande slutare – en funktion som erbjuds av Tucsen-kameror med Rolling Shutter Control Mode.
Vad är rullande jalusi?
Slutaren är den del av kameran som startar och stoppar kamerans exponering för ljus. Tidigare använde vetenskapliga kameror mekaniska slutare, som öppnades för att exponera en bild och stängdes för att avsluta exponeringen. Mekaniska slutare var långsamma och utsatta för tillförlitlighetsproblem vid längre tids användning. Nu använder vetenskapliga kameror elektroniska slutare, vilka är betydligt snabbare, enklare och mer mångsidiga.
Rullande slutarkameror börjar sin registrering högst upp på sensorn och "rullar" ner linje för linje till sensorns botten. Denna registrering involverar tre processer: signalåterställning, ljusexponering och avläsning.
Exponeringen av varje rad påbörjas genom att återställa varje pixels förvärvade signal. Efter att den angivna exponeringstiden har gått för den översta raden, rullar avläsningen, som markerar slutet på förvärvet, nedåt på samma sätt. Detta lämnar ett område med aktiva pixlar som sveper från toppen till botten av kameran, vars höjd bestäms av exponeringstidens längd. Med kameran i full hastighet är fördröjningen per linje vanligtvis mellan 5 och 25 mikrosekunder per linje med pixlar, beroende på kamerans hastighet.
För att dra nytta av optiska tekniker som kräver synkronisering av skanning av belysning och kamerans rullande slutare är denna fördröjning vanligtvis för kort, vilket innebär att den rullande slutaren arbetar för snabbt för att annan hårdvara ska kunna hålla jämna steg. Det är här rullande slutarstyrningsläget kommer in i bilden.
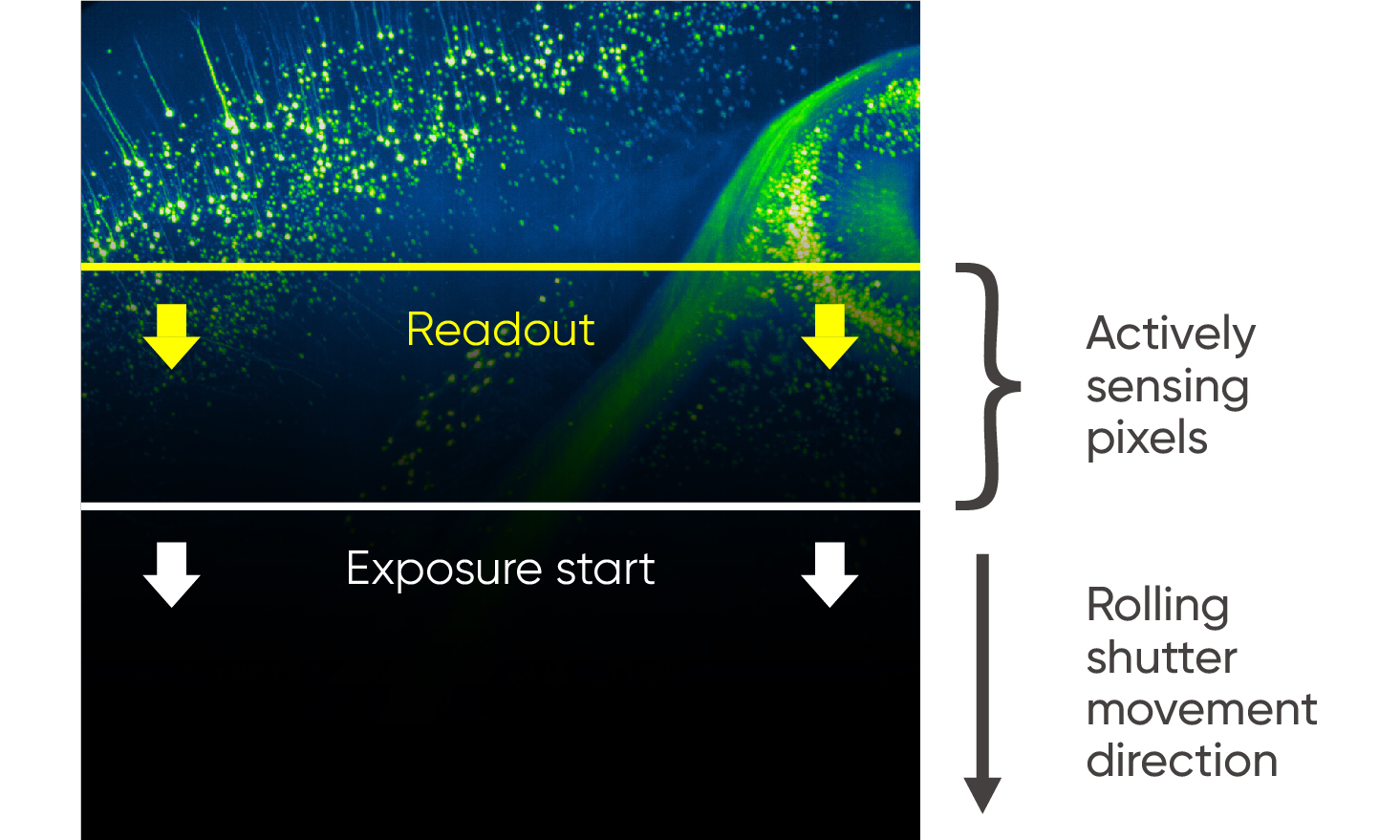
Figur 1: Schematiskt diagram över rullportens funktion
Hur rullande jalusikontroll fungerar
Genom inbyggd intelligens i Tucsens kameror kan kamerans rullande slutare finjusteras exakt för att synkronisera med extern hårdvara. Genom att lägga till en liten extra fördröjning mellan återställningen och avläsningen av varje linje kan den tid det tar för det aktiva pixelområdet att svepa ner sensorn kontrolleras för att möjliggöra denna synkronisering.
Dessutom kan "slithöjden" för det skannade aktiva området finjusteras. Längre exponeringstider eller kortare linjetidsfördröjningar leder till större slithöjd. När det gäller DSLM kan detta användas för att endast matcha det belysta området av provet, vilket skapar en balans mellan att exponera pixlar under maximal möjlig tid för effektiv signalinfångning och att minimera ljus som inte är i fokus.
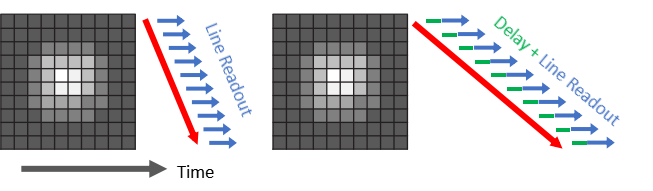
Figur2Vänster: Schematisk bild av rullande slutarens drift vid full kamerahastighet. Höger: Schematisk bild som visar rullande slutarhastighet med rullande slutarläge som lägger till ytterligare fördröjning mellan varje rad för att möjliggöra synkronisering med annan hårdvara.
Med denna valfria fördröjning finns det nu tre viktiga variabler att förstå som avgör hur den rullande slutaren fungerar, vilka indikerar höjden på området med "aktiva" pixlar och hur snabbt den passerar sensorn.
LinjetidDetta är standardtiden det tar för sensorn att läsa av en rad och gå vidare till nästa. Den bestämmer kamerasensorns ursprungliga "hastighet" och kan anges i kameraprogramvaran eller approximeras för ett givet intresseområde (ROI) och kameraläge genom att:

Där 'Maximal kamerabildfrekvens' hänvisar till bildfrekvensen när den inte begränsas av vare sig exponeringstid eller extern utlösningsfrekvens.
Exponeringstid:Detta avgör hur länge varje pixelrad är aktiv, och bestämmer därmed höjden på det aktiva området för en given linjetid och fördröjningstid.
Linjetidsfördröjning:Så här mycket extra fördröjning läggs till av rullande jalusikontrollläge. Rullande jalusikontrollläge tillåter tillägg av fördröjningi heltalsmultiplar av linjetidenOm till exempel linjetiden för en kamera är 10 mikrosekunder, tillkommer en ytterligare fördröjning per linje på 1, 2,…upp till 8 928, kan adderas, vilket indikerar antalet multiplar av 10 mikrosekunder.
Höjden på det använda intresseområdet (ROI) är också viktig, eftersom detta avgör antalet linjer som det aktiva området måste svepa ner innan det återställs.
Rullande jalusikontrollläge Synkroniseringslägen
Det finns två driftlägen för rullande jalusikontrollläge, beroende på vilken variabel som är viktigast att kontrollera.
In Linjetidsfördröjningsläge, kan du ställa in fördröjningstiden enligt ovan. Programvaran kan sedan, för din angivna exponeringstid, ange vad den resulterande spalthöjden blir – höjden på aktiva pixlar i den rullande slutaren.
In Aktiv pixel / spalthöjdI läget kan du ställa in antalet rader för sensorn som du vill ska vara aktiv när den rullande slutaren sveper. Exponeringstiden du har angett kommer sedan att användas för att beräkna den linjetidsfördröjning som krävs för att leverera denna spalthöjd automatiskt.
Konfigurera rullande jalusikontrollläge i programvara
Driftlägeskontroller (status)
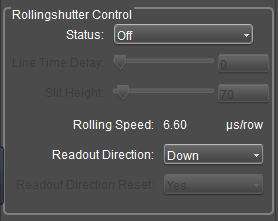
Figur 3: Exempelgränssnitt för att styra rullande jalusikontrollläge från Tucsen Mosaic-programvaran. Alla alternativ tillgänglig via Micro-Manager och SDK.
Tre statuslägen (driftlägen) är tillgängliga:Off, Linjetidsfördröjning, Slithöjd.
• När den är inställd påAv, sensorn beter sig som normalt utan ytterligare fördröjning.
• När den är inställd påLinjetidsfördröjningI läget kan du ange linjetidsfördröjningen i enheter av linjetiden, enligt beskrivningen ovan.
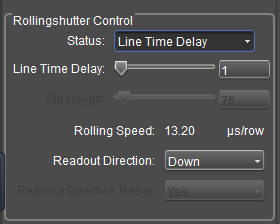
Figur 4: Programvarualternativ för linjetidsfördröjning. Exempelgränssnitt från Tucsen Mosaic-programvaran. Alla alternativ är tillgängliga via Micro-Manager och SDK.
Antalet linjetidscykler som kan läggas till den konfigurerbara fördröjningen varierar från kamera till kamera. Kamerans nya linjetid, efter att fördröjningen har lagts till, är då:
Linjeintervalltid = Linjetid(sensor)+(Linjetid(sensor)× Linjetidsfördröjning)
Parametervärdet förRullningshastighetär lika medLinjeintervalltid.
Den totala avläsningstiden för bilden är då:
Rhuvudut tid(bild)= Linjeintervalltid×Nrader.
Nraderär det totala antalet rader av bildpixlar i intresseområdet. Bildfrekvensen vid avbildning i detta läge beror på antalet linjer som ska avbildas och linjecykeltiden:
Bildfrekvens = 1/(Avläsningstid(bild)+ Exponeringstid)
•När den är inställd påSlithöjd mode, du kan ställa instorleken på det aktiva området som skannas, givet av tAntalet pixelrader mellan "återställnings"-signalen och "avläsnings"-signalen.Intervallet för spalthöjd är 1~2048, i pixelenheter. För att konvertera detta till en fysisk storlek, multiplicera detta värde med pixelstorleken från kamerans specifikationsblad.
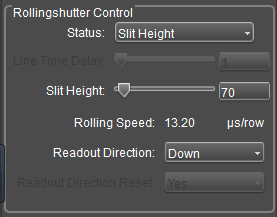
Figur 5: Kontrollalternativ för slitshöjdsläge. Exempelgränssnitt från Tucsen Mosaic-programvaran. Alla alternativ är tillgängliga via Micro-Manager och SDK.
Programvaran beräknar automatiskt den erforderliga linjefördröjningen och linjeintervalltiden. Formeln är följande:
Linjetidsfördröjning = Exponeringstid(Rader)/ Slitshöjd(Rader)
I höghastighetsläge (kamerans förstärkningsläge) kan spalthöjdsintervallet endast ställas in på ett jämnt tal eftersom linjerna i det läget avläses två gånger två. Parametrarna i höghastighetsläge beräknas enligt följande.
Linjetidsfördröjning = Exponeringstid(Rader)/ ½Slithöjd(Rader)
Slithöjd = (Exponeringstid(Rader)÷ Linjetidsfördröjning)×2
Kontroller för skanningsriktning
Det finns tre alternativ för riktningen på den rullande jalusin:
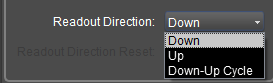
DegenNedåtriktad skanningsriktning är standardskanningsriktning för sCMOS-kameror. Rullande slutare börjar från den första raden högst upp på sensorn och skannar ner till den sista raden längst ner. Varje efterföljande bildtagning börjar med den första raden högst upp.
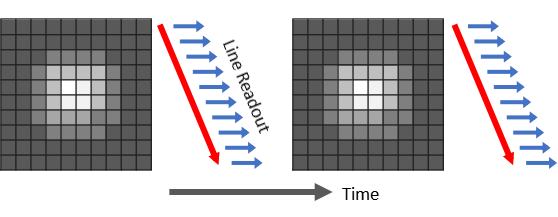
Figur 6: Schematisk bild av nedåtgående skanningsläge
Up:I uppåtgående skanningsläge börjar den rullande slutaren från den nedersta raden och skannar upp till den översta raden i den första raden. Varje efterföljande bildinsamling börjar från den nedersta raden. Även om ordningen för datainsamling på kameran nu är omvänd, kommer den resulterande bilden som levereras till programvaran fortfarande att visa den ursprungliga orienteringen, dvs. bilden kommer inte att vändas vertikalt i förhållande till nedåtgående skanningsläge.
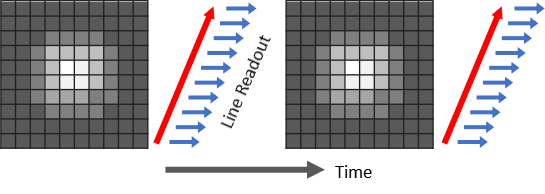
Figur 7: Schematisk bild av uppåtgående skanningsläge
Ned-upp-cykelVid skanning växelvis uppåt och nedåt börjar den rullande slutaren från den första raden överst och går ner till den sista raden längst ner. För nästa bildruta börjar den rullande slutaren från den nedersta raden och skannar uppåt till den översta raden, och så vidare. Orienteringen på bilden som tas i detta läge är densamma som den nedåtgående skanningsorienteringen.

Figur 8: Schematisk bild av skanningsläge för nedåt-uppåtcykler
• Reatvekan Riktning Återställ
Den här funktionen är endast tillgänglig i ned-upp-cykelläget.
Standardinställningen för den här parametern är "Ja", vilket säkerställer att den första bildrutan i varje ny tagningssekvens börjar på den översta raden och skanna nedåt.
När den här parametern är inställd på "Nej" börjar den första bildrutan i varje ny inspelning på den position där den sista bildrutan i föregående sekvens var. Om den sista bildrutan slutar på den nedersta raden börjar den första bildrutan i efterföljande inspelningar på den nedersta raden och fortskrider uppåt.











